Project
Robotic Arm
VR Control

Principium
Statio
Iter
Celsitudo
Requies
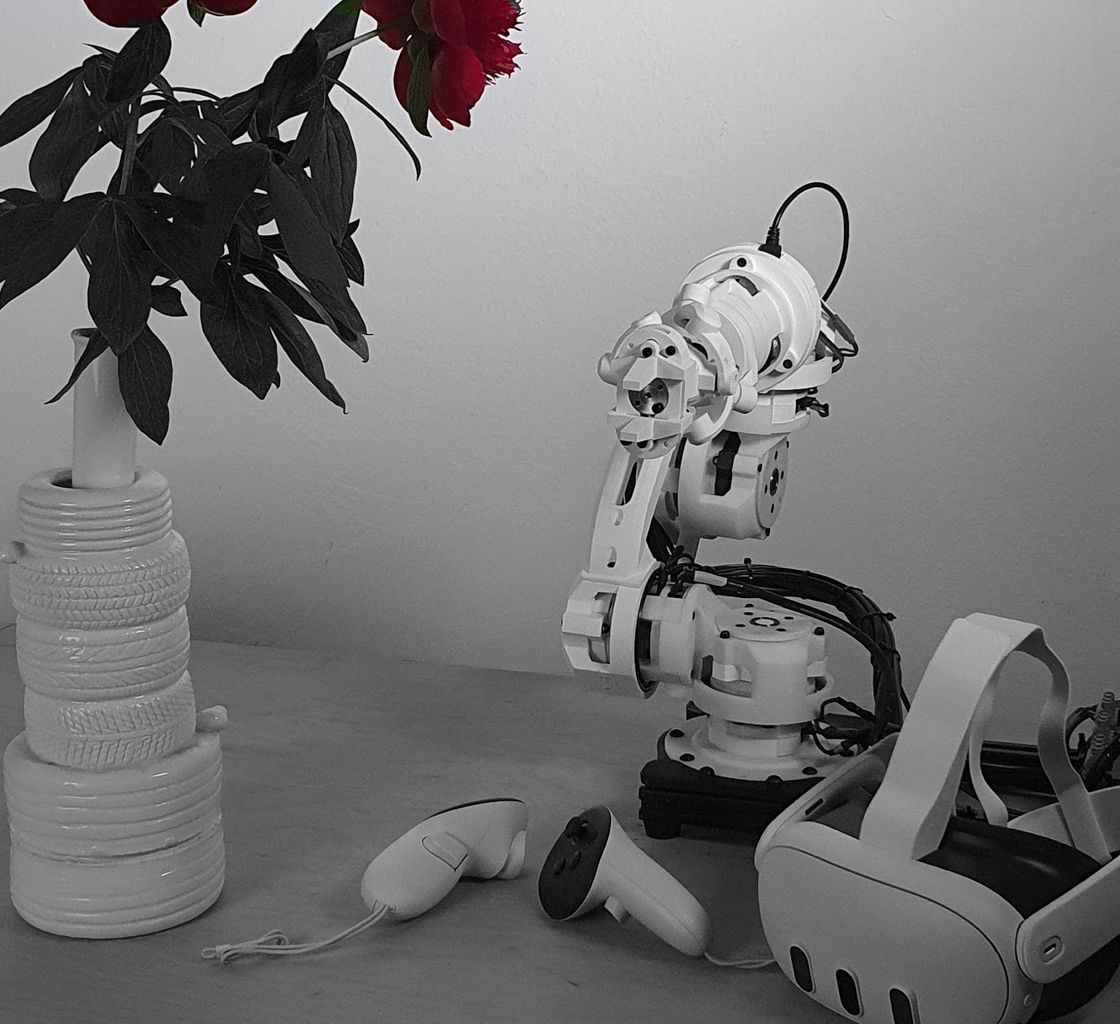
Transitioning our robotic arm training to LeRobot marks a significant shift from manual simulation to state-of-the-art machine learning for real-world robotics. By leveraging this PyTorch-based framework, we will move into a data-driven ecosystem focused on imitation and reinforcement learning. LeRobot lowers the barrier to entry by providing a robust collection of pretrained models and human-collected datasets hosted on Hugging Face, allowing our robotic arm to learn complex tasks through demonstration rather than rigid programming. This approach ensures high transferability from digital environments to physical hardware, making advanced automation more accessible and efficient. As we integrate these tools, the focus shifts toward utilizing shared community resources and scalable AI models, revolutionizing how robotic systems are trained, maintained, and deployed in practical, real-world scenarios.
Machina

Coniunctio

Refugium
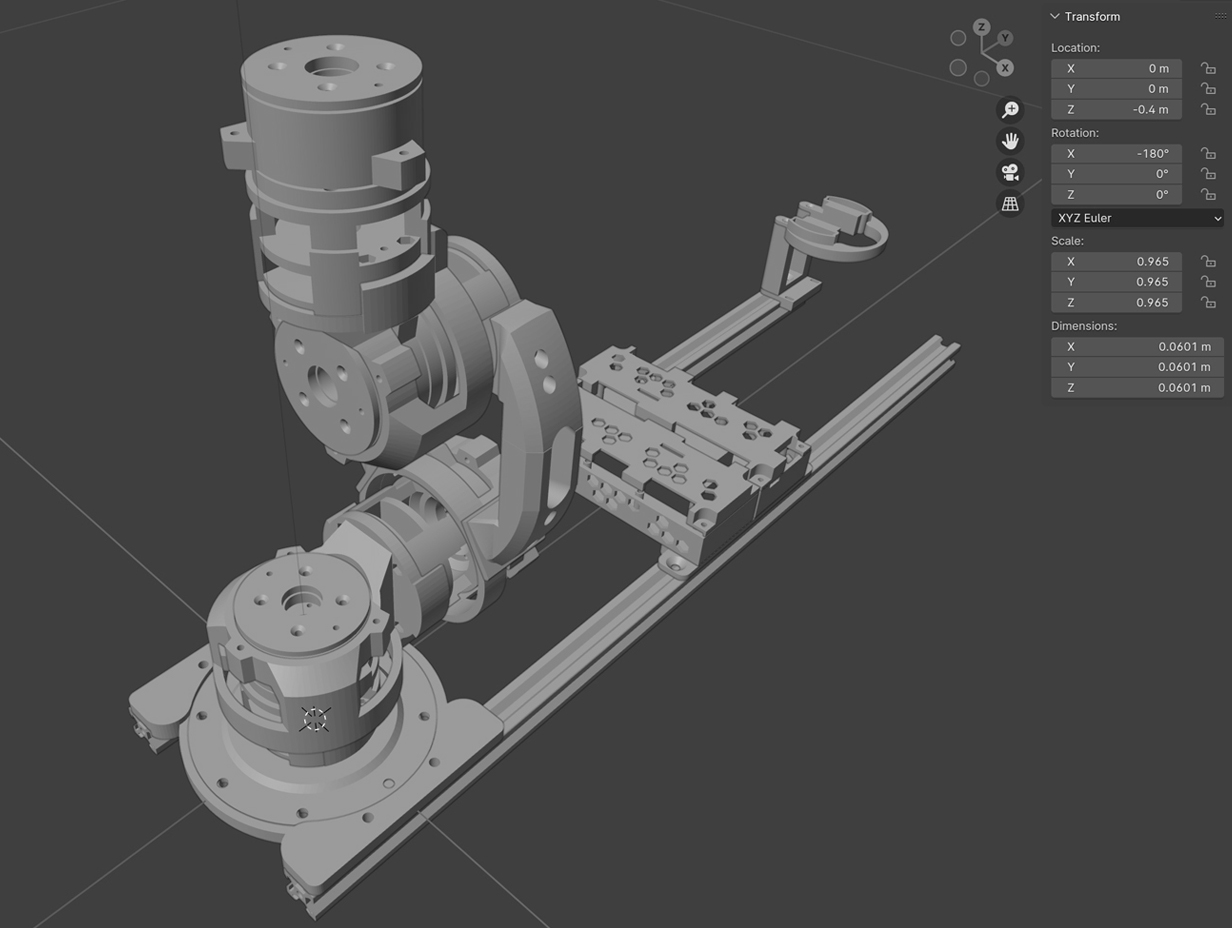
For the development of our next robotic arm, we are moving away from traditional high-reduction BLDC actuators toward a Quasi-Direct Drive (QDD) architecture using the CubeMars AK Series. In collaboration with CubeMars, we are leveraging their AK Series actuators to achieve the precision, responsiveness, and agility required for this system.
We will be documenting the entire development process as part of a "Build Journey" series—from CAD design and structural optimization to CAN bus integration and control.
All current and future 3D printing files, including the SPM and Cycloidal Gearbox models, are available on our Printables profile under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
For those interested in the analytical side, the Jupyter Notebook covering the inverse kinematics of the SPM is also available to fork and extend.
Ultimum